Выдуманная проблема вагонетки для беспилотников
С развитием беспилотных автомобилей в статьях всё чаще упоминается «Проблема вагонетки». Якобы беспилотник должен решать кого спасать основываясь на количестве, возрасте, весе, поле, достатке людей и видах животных. Эта проблема выдуманная — она для эмоциональных людей, а не для логичных машин. Решение здесь одно: авто должно оставаться на заранее выбранном курсе и тормозить с сохранением управляемости.
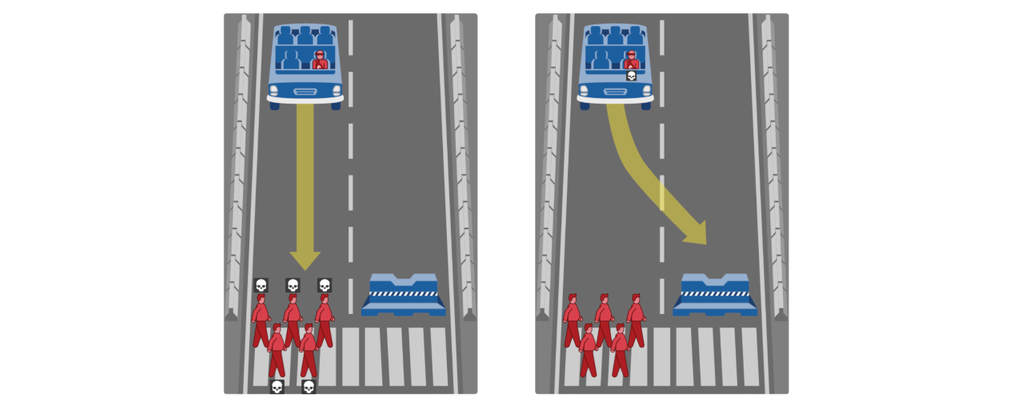
Давайте представим ситуацию что на «зебре» пешеход и у машины отказали тормоза. Вроде бы пешеход прав и его нужно спасать объезжая, но это не так.
Станете ли покупать автомобиль, который пожертвует вами ради «препятствия»? Сомневаюсь: это как завести собаку, которая загрызёт хозяина при появлении грабителя.
Попытка вывернуть руль приведет или к вылету на встречку, или к тому что соседние машины увидят ваше авто и тоже начнут резко его избегать, что приведет к массовой аварии. Да, человек будет сбит, но такие случаи будут расследоваться. Прошивки получат исправления алгоритмов, в ПДД внесут новые пункты, изменят инфраструктуру дорог, машины получат дополнительные проверки тормозов и даже механизмы аварийной остановки. Количество аварий всё равно сократится во много раз, потому что автомобили прекратят превышать скоростной режим, не будут перестраиваться между рядами в попытке приехать на минуту быстрее и не сядут за руль пьяными. Ещё уменьшить количество происшествий можно будет на следующем этапе, когда все беспилотники будут объединены связью в единый «рой». Тогда каждый соседний автомобиль получит команду на сколько градусов повернуть и до скольки сбросить скорость чтобы не столкнуться друг с другом и с препятствием.